
求解超静定结构有两种基本方法:力法,位移法。
19世纪末先出现力法。20世纪初,钢筋混凝土结构开始大量应用,出现高层建筑,大量的高次超静定结构,用力法求解十分麻烦,于是在力法的基础上建立了位移法。位移法由于其通用性、规范性、易编程,目前应用十分广泛(即有限元法)。
力法(柔度法):以多余约束力为求解的基本未知量。
位移法(刚度法):以未知结点位移为求解的基本未知量。
理论依据:内力状态Û位移状态 (一一对应),故可先确定出位移状态,再求出相应的内力状态。
下面以一个例题说明位移法的基本原理与解题思路。
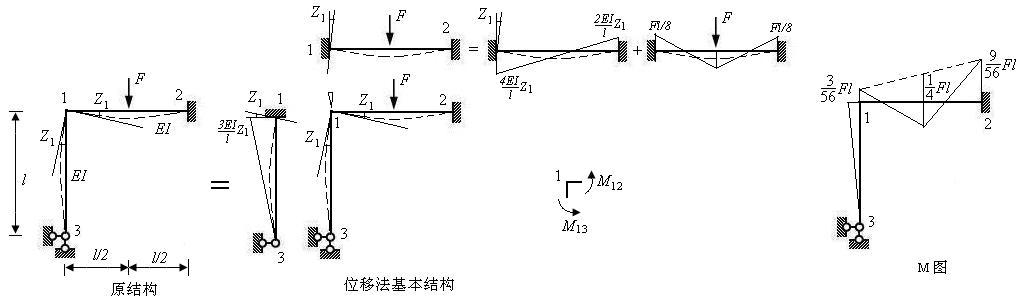
图8.1
位移法基本未知量:Z1
基本结构:刚结点1上附加刚臂约束,得到位移法基本结构,相当于将结构离散成二个单跨超静定梁。
使基本结构与原结构等价,则刚结点1在Z1方向,必须满足力矩平衡条件,即

计算最后杆端弯矩值
 (左侧拉),
(左侧拉),  (上侧拉),
(上侧拉),
 (上侧拉)
(上侧拉)
作出 图,如图示。
图,如图示。
因此,在位移法中需要解决以下几个问题:
(1) 单跨超静定梁的内力,是位移法解题的基础,应事先用力法求解出结果并列成表格备查。
(2) 哪些结点位移作为位移法的基本未知量?
(3) 如何列出方程求解出未知的结点位移?
(4) 如何确定结构最后的内力?
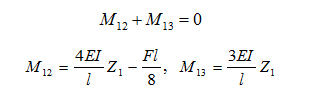
 位移法的基本未知量和基本结构
位移法的基本未知量和基本结构

位移法的基本未知量:
(1) 刚结点的角位移;(2) 独立的结点线位移。
注意
(a) 所有支座处的位移(如果有的话),不作为位移法的求解未知量,仅考虑结构的内部结点即可。
(b) 自由端处的位移也不作为未知量。
位移法的基本结构:
(1) 刚结点上附加刚臂约束;(2) 结点线位移方向上附加链杆支座约束
就得到了位移法的基本结构
位移法基本体系,实际上是把原结构离散成若干根单跨超静定梁,然后根据原结构的边界约束条件与变形协调条件,再组装回原来的结构进行求解。

(a) 原结构 (b) 位移法基本体系 (c) 位移法离散体系
图8.5 忽略轴向变形
注意:与力法不同,位移法基本未知量与基本结构具有唯一性。

(a) 原结构 (b) 位移法基本体系
图8.6
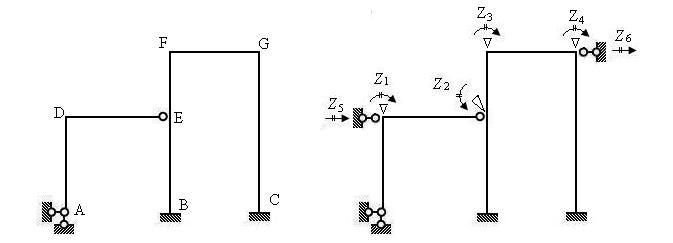
图8.7
图8.8

图8.9


