可直接由平衡条件建立位移法方程
可直接由平衡条件建立位移法方程

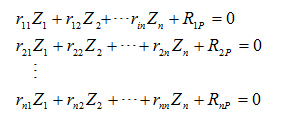
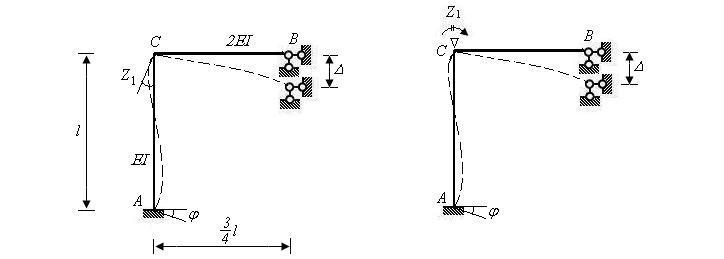
如下图所示,前面已用位移法标准解法求解过。下面用转角位移方程,直接由结点平衡条件进行求解。
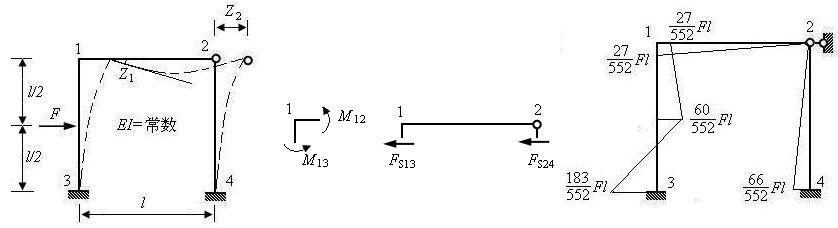 图8.15
图8.15
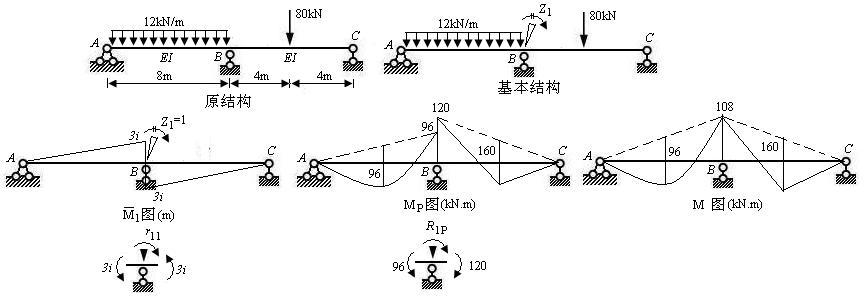
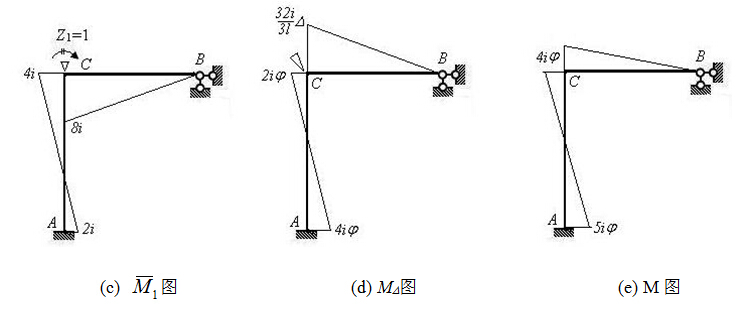
根据两端固定梁的转角位移方程,有
 ,
, ,
,
根据一端固定一端铰支梁的转角位移方程,有
 ,
, ,
, 
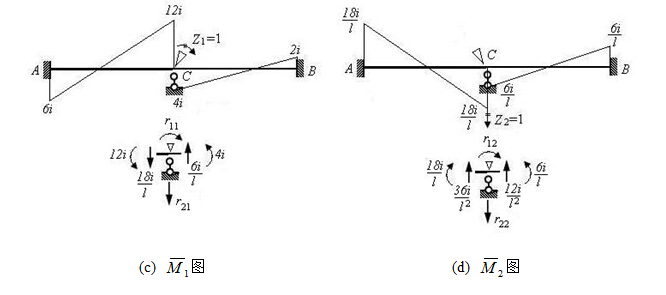
列出平衡方程, ,
, , 有
, 有
 ,
, 
解得,  ,
, , 求出最后杆端弯矩值,作出
, 求出最后杆端弯矩值,作出 图,与前面结果完全相同。
图,与前面结果完全相同。
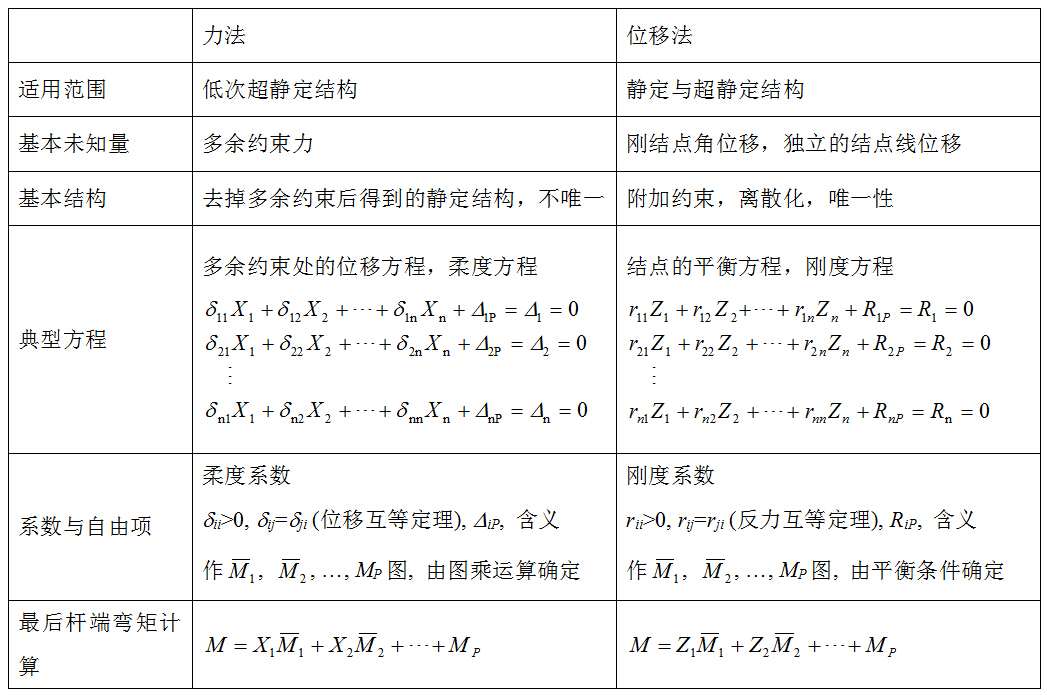
★ 力法与位移法的对比
★ 位移法中的符号规定(强调)
杆端弯矩,绕杆端顺时针为正,绕结点或支座逆时针为正
轴力拉力为正,剪力绕隔离体顺时针为正
转角,顺时针为正
附加刚臂上的反力偶,顺时针为正
附加链杆支座上的反力,与结点线位移同向为正。
注意:求刚度系数与自由项时(都是附加约束上的反力或反力偶),均先画成正方向,不能画成负方向。
对称性的利用
关于对称性的利用,力法中已讲过,关键是记住以下结论。
Ñ 对称结构,正对称荷载,对称轴处切开, ;
;
Ñ 对称结构,反对称荷载,对称轴处切开, ,
, 。
。
应用上述结论,就会利用对称性取半边结构进行简化计算了。
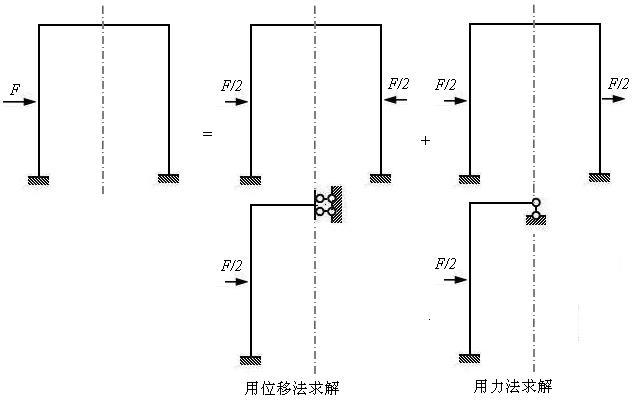
图8.16
图8.17
【例8-4】 利用对称性求解图示刚架, 常数。
常数。
 ,
, ,
, ,图如图示。
,图如图示。
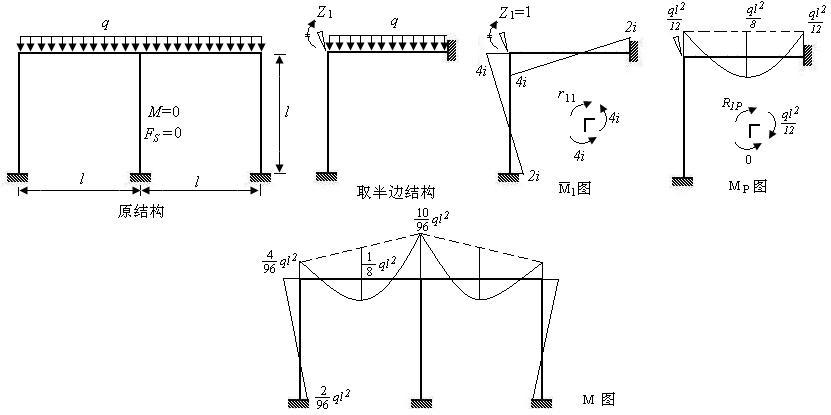
图8.18
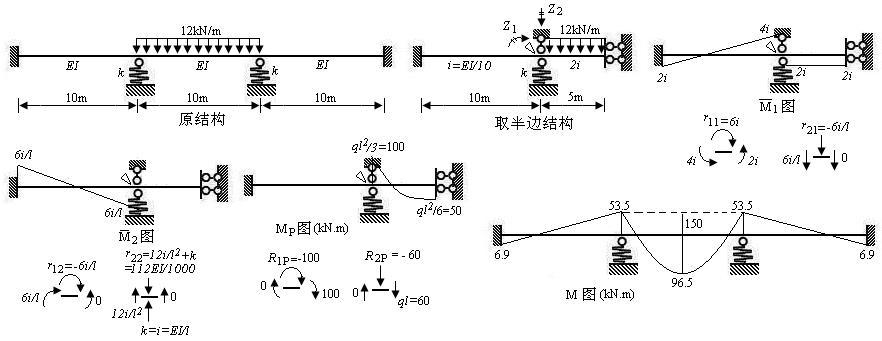
【例8-5】 弹性支承三跨连续梁,常数, ,做 图。
,做 图。
利用对称性,取半边结构计算。 ,
, 
 |
| 图8.19 |
有, ,
, ,解出
,解出 ,
,
计算最后的杆端弯矩,作出图。