下面通过几个例题,来掌握机动分析的方法与步骤。
【例2-3】

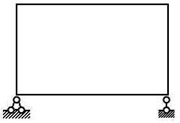
图2.13
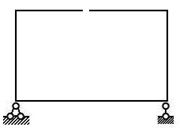
解(1):基础上依次添加二元体;解(2):从最右边开始依次拆除二元体。结论是几何不变无多余约束体系。
【例2-4】

图2.14
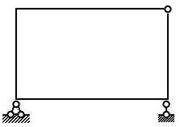
去掉右端的二元体,几何不变有1个多余约束体系,1次超静定结构。
【例2-5】
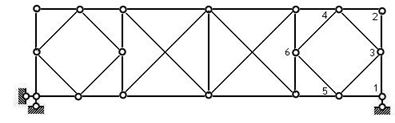
图2.15
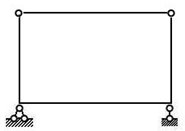
只有3根支座链杆,这种情况下可只分析体系本身。依次拆除二元体1、2、3、4、5,结点6处2根链杆处在同一直线上,瞬变体系。
【例2-6】
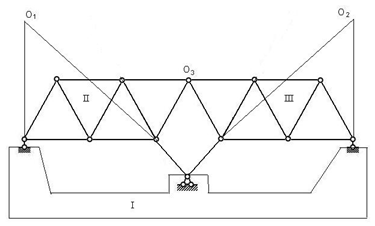
图2.16
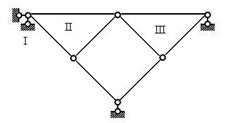
有4根支座链杆,不能去掉,只能连支座一起分析。三刚片规则,三个铰不共线,几何不变无多余约束体系。
【例2-7】
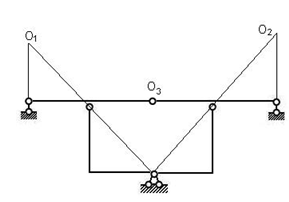
图2.17
三刚片规则,三个铰不共线,几何不变无多余约束体系。
 机动分析步骤:
机动分析步骤:
(1) 当体系只有3根支座链杆与基础相连时,可去掉支座,只分析体系本身;
(2) 看外围有无二元体可拆除;
(3) 选取2或3个基本刚片,如果行不通可尝试不同的选取方案;
(4) 分析刚片之间的联结情况,看是否符合规则;
(5) 结论:几何不变无多余约束,几何不变有几个多余约束,瞬变体系,常变体系。
注意事项:所有杆件、支座、结点、包括基础等都要用上,不能遗漏,也不能重复利用。
【例2-8】
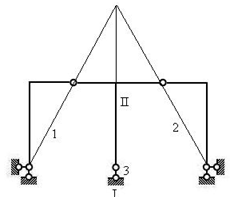
图2.18
二刚片规则,连接刚片I、II的3根链杆1、2、3汇交于同一点,瞬变体系。
【例2-9】
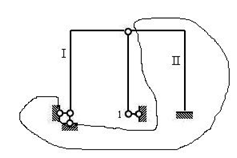
图2.19
去掉二元体1,刚片I、II之间用1铰与2根杆相连,几何不变有1个多余约束体系。
【例2-10】
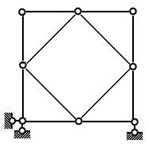
图2.20
从外围依次拆除二元体,常变体系。
【例2-11】

| 
| 
|
| (a)几何不变无多余约束 | (b) 几何不变有1个多余约束 | (c) 几何不变有2个多余约束 |
| 
|
| (d)几何不变无多余约束,同(a) | (e) 几何不变有3个多余约束 |
图2.21

三刚片体系中虚铰在无穷远处的情况

无穷远虚铰:连接2个刚片的一对平行链杆,相当于将2个刚片在无穷远处铰接,称为无穷远虚铰。
1) 一个无穷远虚铰 |
|---|
 |  |  |
| (a)三铰不共线,几何不变 | (b)三铰共线,瞬变 | (c)三铰共线,平行且等长,常变 |
图2.22
组成无穷远铰的一对链杆,与另外两个铰的连线不平行,则三铰不共线,几何不变。
2) 二个无穷远虚铰 |
|---|
|  |  |
| (a) 两对平行链杆之间不平行,三 铰不共线,几何不变 | (b) 两对平行链杆之间又平行,瞬变 | (c) 平行且等长,常变 |
图2.23
3) 三个无穷远虚铰 |
|---|
| 
|
图2.24
(a) 三对平行链杆,三个无穷远虚铰,高等几何学中有定理,平面上所有的无穷远点均在同一条直线上。所以,这种情况下是三铰共线,瞬变体系。
(b) 三对平行链杆又各自等长,常变体系。
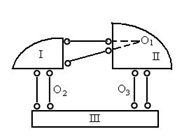
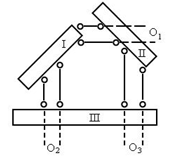
【例2-12】
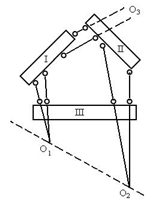
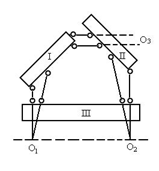
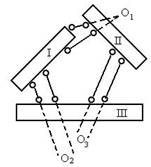
图2.25
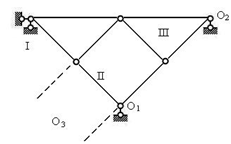
(a) 基本刚片选取不当,无法分析,要换思路。
(b) 组成O3的一对平行链杆,与O1、O2连线平行,三铰共线,瞬变体系。
几何构造与静定性的关系
常变体系:一般情况下,不满足静力平衡条件。不能承载。
瞬变体系:荷载作用下,内力无穷大,0荷载作用下,内力=0/0,为不定值。不能承载。
几何不变无多余约束体系: ,
, , 方程数目
, 方程数目 未知力数目,静力平衡方程组有唯一一组解,静定结构。
未知力数目,静力平衡方程组有唯一一组解,静定结构。
几何不变有多余约束: ,
, ,方程数目
,方程数目 未知力数目,静力平衡方程组有无穷多组解,超静定结构。
未知力数目,静力平衡方程组有无穷多组解,超静定结构。